
DEVELOPMENT OF A HAND GLOVE CONTROLLER REHABILITATION AIDS
- Muhammad Hafizudin Bin Abdul Manas
Abstract
A hand-glove with a sensor is developed for rehabilitation aids. The aim of this paper is to demonstrate the hand glove with a sensor that can be used as an input signal for rehabilitation purpose. This project, the wheelchair is used as a mechanism. The project will be control by the flex sensor. This sensor will be guide the wheelchair to move forward, reverse, right and left direction by using the algorithm hand gesture. The Arduino UNO (ATmega328) is used as an interface with the flex sensor and wheelchair. This Arduino will convert resistance input from sensors with analog read to digital read by using ATmega328. Then it will response with the pulse with modulation (PWM) by using driver motor to accelerate the DC motor. The output will give the instruction for wheelchair motion such as forward, reverse, left and right.
Keywords – Hand Glove, Flex Sensor, Wheelchair, Microcontroller Arduino UNO, Hand Gesture
INTRODUCTION
In real life, there are many people who are having disability physically that cannot communicate, listen, walking and more. For the disable people, rehabilitative aids it important to maintain their daily activities same as normal people. In many years, Stroke affects almost one million people and 80 % survivors are left with weakened limbs and hands. There are many designs and method was developed to regain their hand movement and strength. A rehabilitation technique system has been designed to help the patient or disable people [4]. One of the most common human physically activities are walking. Walking is an important role in human daily. Patient or disable people have this problem need the rehabilitation aids. For example, wheelchair is one of the mechanisms to help the disable people to continue their daily activities. Current wheelchair that everyone uses nowadays it manually controls it with their barehanded or need assistance to move the wheelchair. Many evolution has been transform to control the wheelchair such as powered wheelchair, wheelchair control by using voice commands, wheelchair control by joystick and wheelchair control by pressing button.
Get Help With Your Essay
If you need assistance with writing your essay, our professional essay writing service is here to help!
Wheelchair control by voice command is one of the methods to help disable people. This mechanism is design based on vocal command. There are have several condition to move the wheelchair such forward, backward, right, left, stop, light on and light off. Vocal command has limited and must use the same voice to control the motion of wheelchair. Efficiency to control in silent environment is higher than noise environment [1]. Pressing button also can be control the wheelchair, it been setup in programming to move wheelchair in particular place. For example, when disable people press the button 1 it move to the kitchen or press button 2 moves to living room. The wheelchair it helps with a sensor to detect the obstacle in its path. It follows the line algorithm path based on black and white surface on the floor [2]. For this papers and this idea, this project consist:
- Development of Control Algorithm
- High Level programming language
Development of Control Algorithm
The algorithm referred to any computation performed under a set of rules that applied to numbers in a decimal form. An algorithm can be represented of a solution to a problem. The control algorithm is the most important characteristic and the one to consider first. The control algorithm interpreted the true nature of output as a function of the input.
For example, algorithm is hand gesture to produce the output. The hand gestures used for controlling robot’s motion, in video games [3]
High Level programming language
In order to develop a control algorithm, high level programming language is used. High level languages are designed to understand than assembly languages and allow a program to run. The translation of high level languages into object code needs a source code.
For example, wheelchair using MEMS sensor has been using c language programming into PIC microcontroller to control the wheelchair motion [4].
LITERATURE REVIEW
Hand Glove Control
In modern biomedical technologies, a robotic system has been used in physical assistance and rehabilitation such as soft robotic glove. Glove is a portable device that patient can be wear for exercise individual fingers to minimize the stresses on their hand during therapy. The application used new technologies in now days such as The PowerFoot One and Luke Arm. For The PowerFoot One is an advanced complete ankle and foot prosthesis. The user legs move like a normal person walking when their use this product because this product mimic human foot. For Luke Arm device designed to provide a person with a partially articulated robotic arm that uses foot pads to control and move it [4]. Moreover, hand- glove also implemented into control the machine toys such as helicopter and remote car. It uses the same technique that the person wears the glove as the control and use the variables motion to move the machine. The function is similar same as joystick [7]. The same concept applied to this project where the hand glove is used. The hand glove will act as a controller in moving the wheelchair according the movement of fingers.
Flex Sensor
Nowadays, high technologies used robot to move something and doing a task to replace the human being. Sensor plays important role in robotic. A sensor is device that can measure the motion in high degree. Flex sensors are analog resistors. These resistors work as variable analog voltage divider. Inside the flex sensor are carbon resistive elements with thin flexible substrate. Figure 1 shows degree of bending for flex sensor. Smaller the radius, higher will be the resistance value [8]. From this research, design powered wheelchair which control by using hand movement. Used two fingers of hand gloves are needed to control the wheelchair. Two photodiodes at upper side and two sensors locate opposite side for these two fingers. Microcontroller is programming for different code combinations, it also know as converters from input signal to output, it decoded the signal into appropriate movement of wheelchair with accelerate DC motor. [3]

Figure 1: Flex Sensor offers variable resistance readings
Retrieved from
Flex Sensor Based Robotic Arm Controller Using Micro Controller [8]
ALOGRITHM HAND GESTURES
In our daily activities, many people frequently used hand gesture to communication such as thumb up for good and two fingers like ‘V’ shape for peace. Many researchers [4] [8] used hand gesture to identifying and recognize some form of action without saying it to express the action have their do. Joyeeta Singha project for sign language hand gesture step by step. The system consist five step such as skin filtering, palm cropping, edge detection, feature extraction and classification. Recognize obtain almost 90% for different symbols. [4]. Y Tabata is developing hand gesture for spelling in Japanese language. Creating the hand gesture to obtain the alphabet and numbering to get spelling. [8] The same concept hand gesture applied for algorithm to control the wheelchair movement and motion.

Figure 2: Example of hand gesture that cropping [4]
METHODOLOGY
Project Overview

Figure 3: Block Diagram of Hand Glove System
Figure 3 shows a block diagram of hand glove system including Flex sensor 2.2 “, Amplifier, Atmega 328 (Arduino UNO) microcontroller, Dual channel 10A motor driver and DC Motor. The input is flex sensor and the output is DC Motor
Microcontroller is a main core for the whole that will generate Pulse Width Modulation (PWM) signal to control the dual channel motor driver. Dual channel motor driver produce the output signal to motor from the PWM to accelerate the DC motor slow or fast. The resistance input from sensors will converter from analog read to digital read in binary number by using Arduino.
Flex Sensor with amplifier
Figure 4 shows the flex sensor connection circuit for resistance to voltage converter. The range resistance of input for this flex sensor is 0 to 10K Ohms.

Figure 4: Resistance to Voltage converter connection
A negative reference voltage will give a positive output. The output value is produced when the sensor in condition of low degree of bending. The Op-amp is used to produce the signal from the input to the output as a voltage in a wide range. For this project is used is LM324 as amplifier. LM324 consists of four independent, high gains, internally frequency compensated operational amplifiers. Figure 5 shows the performance characteristic of LM324, from this figure 5, the higher supply voltage versus the input voltage.
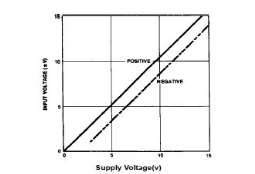
Figure 5: Input Voltage Range vs Supply Voltage
 Atmega328 Microcontroller
Atmega328 Microcontroller
Figure 6: ATmega 328 microcontroller
Figure 6 shows the ATmega 328 microcontroller’s pin which triggers the signal to motor driver. The generated pulse width modulation (PWM) signal is sent to motor driver from specific pin port. This microcontroller also convert the resistance input from the sensors with analog read to digital read in binary number.
EXPERIMENT SETUP

Figure 7: Blok diagram hand glove control system
The hand glove controller has been developing in order to assist disable people to accelerate the wheelchair. Figure 7 shows the 5 main part combine together to perform hand glove control the wheelchair movement and the Arduino board becomes important electronic device.

Figure 8 : Hand Glove with Flex Sensor
Figure 8 shows the assembly hand glove with flex sensor. It is portable and easy to handle. One hand is used and there have four flex sensors that attached on the hand glove. Each sensor is fitted with the length of each finger except thumb. For each finger has their own function to control the movement of wheelchair and voltage required is +5v. It will convert resistance input from sensors with analog read to digital. Each finger for each sensor also has own function to accelerate the wheelchair. Table 1 shows the function and motion for each sensor.
Table 1: Function of each sensor
|
No |
Sensor |
Motion of wheelcahir |
|
1 |
A |
Forward |
|
2 |
B |
Backward |
|
3 |
C |
Right |
|
4 |
D |
Left |
RESULT AND DISCUSSION
Based on the experiment setup, a new algorithm is developed for the movement of hand glove system to control the wheelchair. The new development of hand glove controller consisted of Arduino, PWM and wheelchair system. In this project, the c language has been used as a medium of language and it already programmed into Arduino Uno. The source code is written based on the performing work decision and control algorithm based on hand gesture. Figure 9 shows flowchart for algorithm to accelerate the movement of wheelchair.


Figure 9: Flow Chart for Algorithm Hand Gesture
After the source code has been programmed in to Atmega328 microcontroller (Arduino UNO board), the hand glove controller system is test by two different method. The first test of the programming is without DC motor. Second test, the programming will test with DC motor are conducted in order to see either the development of control algorithm is functioning or not.

Figure 10: the assembly hand glove system with wheelchair
Figure 10 shows the real situation where people seat on the wheelchair with hand controller system. In these experiment two normal male subjects, age 25 with weight range 50-70 kg. For second test, the performance was good and the mechanism in good functional. The DC motor was performed based on the signal provided by dual channel motor drive with algorithm. Table 2 shows that hand gesture and direction of wheelchair movement.
Table 2: Hand Gesture and direction of movement
|
Hand Gesture |
LCD Display |
Direction |
|
|
|
Wheelchair Stop |
|
|
|
Wheelchair forward slow or fast followed by degree bends of fingers. |
|
|
|
Wheelchair reverse slow or fast followed by degree bends of fingers. |
|
|
|
Wheelchair right slow or fast followed by degree bends of fingers. |
|
|
|
Wheelchair left slow or fast followed by degree bends of fingers. |



















Table 2 shows the hand gesture algorithm and direction of wheelchair when it applied. From this test, the control system implementation using this hand glove system development is quite successful with the wheelchair system. Therefore, it also gives the disable people use wheelchair without assistance in their daily activities. DC motor has been controlled by motor controller with interface Arduino that was programmed by C language.
Table 3: Reading of flex sensor and condition of wheelchair
|
Sensor |
Condition of Wheelchair Movement |
Reading of flex sensor (Hz) |
|
A, B, C and D |
Stop |
A,B,C,D < 50 A,B,C,D > 150 |
|
A |
Forward |
50 |
|
B |
Backward |
50 |
|
C |
Turn Right |
50 |
|
D |
Turn Left |
50 |
Table 2 shows the reading of flex sensor and condition of wheelchair when the algorithm is applied. The wheelchair stops when the PWM value for each sensor below 50Hz or more than 150Hz, DC motor stop. For forward slow and fast, sensor A value 50Hz Find Out How UKEssays.com Can Help You! Our academic experts are ready and waiting to assist with any writing project you may have. From simple essay plans, through to full dissertations, you can guarantee we have a service perfectly matched to your needs. View our academic writing services In this project, the development of hand glove controller for rehabilations aids is propose to assist the disable people that have problem such as walking. It will help them to control the wheelchair more easily. The implementation of control algorithm and device into the system hand glove become succesfull.This application, it will be easier the disable people or patient to control wheeelchair by their self. In addition , the development of algorithm for hand gesture gave some easily to control the system and it comfortable. There, the objectives of this project can be said as successfully, which is algoritm can give instruction the motion of wheelchair.
CONCLUSION
REFERENCES
Cite This Work
To export a reference to this article please select a referencing style below: